Le more del mercato fresco sono per lo più raccolte a mano per mantenere la qualità di questo frutto delicato dalla raccolta al consumo. La carenza di manodopera, i costi della manodopera e la lentezza della raccolta manuale ostacolano la potenziale espansione delle more sul mercato fresco e l'offerta pronta per il mercato. Le opzioni di raccolta automatizzata (scuotendo le piante, tagliando i gambi o usando pinze rigide) sono già usate per altri frutti. Tuttavia, queste opzioni non sono fattibili per la raccolta delle more del mercato fresco perché potrebbero causare problemi di qualità come la perdita delle bacche o l'inversione delle drupe rosse (le drupe passano dal nero al rosso) al momento della raccolta o durante lo stoccaggio.
La soft robotics (robotica morbida) fornisce un'opzione innovativa per la raccolta automatica utilizzando pinze conformi (gomma, silicone, ecc.) che consentono la versatilità del compito di afferrare e manipolare oggetti delicati con forme complesse e dinamiche. Un team di ricerca dell'Università dell'Arkansas sta sviluppando soluzioni basate sull'ingegneria utilizzando la robotica morbida per implementare la raccolta delicata delle more del mercato fresco utilizzando una pinza robotica morbida progettata su misura. Uno dei primi passi per sviluppare la pinza robotica morbida è quello di raccogliere dati sulla raccolta di more fresche che potrebbero essere necessari per progettare e programmare il robot.
Quando una persona raccoglie una mora, quali dita vengono usate per afferrare la mora, quanta forza è necessaria per raccogliere il frutto dalla pianta, e come influisce questo sulla qualità della frutta? Per rispondere a queste domande, il team di ricerca ha creato un apparecchio di rilevamento della forza fatto su misura con sensori di forza flessibili sul pollice e sull'indice, il medio e l'anulare di una persona che raccoglie le more per il mercato fresco.

Questi sensori hanno misurato le forze applicate durante la raccolta delle bacche da ogni dito sulla superficie delle bacche. I dati sono stati registrati per l'apparato di rilevamento della forza utilizzando una custodia portatile resistente all'acqua alloggiata in uno zaino e i dati elaborati sono stati trasmessi e registrati su una stazione di lavoro mobile.

Oltre 2.000 more sono state raccolte da un coltivatore professionale di more in Arkansas utilizzando l'apparecchio di rilevamento della forza. L'analisi dei dati ha indicato che il pollice ha applicato la forza più alta (0,78 N), seguito dal medio (0,40 N), dall'indice (0,19 N) e dall'anulare (0,07 N). Questi risultati riflettono la relazione anatomica della mano durante il prelievo, dove il pollice e il medio agiscono come applicatori di forza primaria mentre l'indice e l'anulare agiscono come stabilizzatori. Il team di ricerca ha messo in relazione i valori di forza misurati con gli attributi di qualità delle more, che sono state valutate in confezioni dopo 21 giorni a 2°C. Gli attributi di qualità erano paragonabili alla raccolta senza l'apparecchio di rilevamento della forza, con basse perdite (6%), marciume (<2%), e drupe rosse (5%), stabilendo così che l'apparecchio di rilevamento della forza non avesse compromesso la qualità delle bacche.
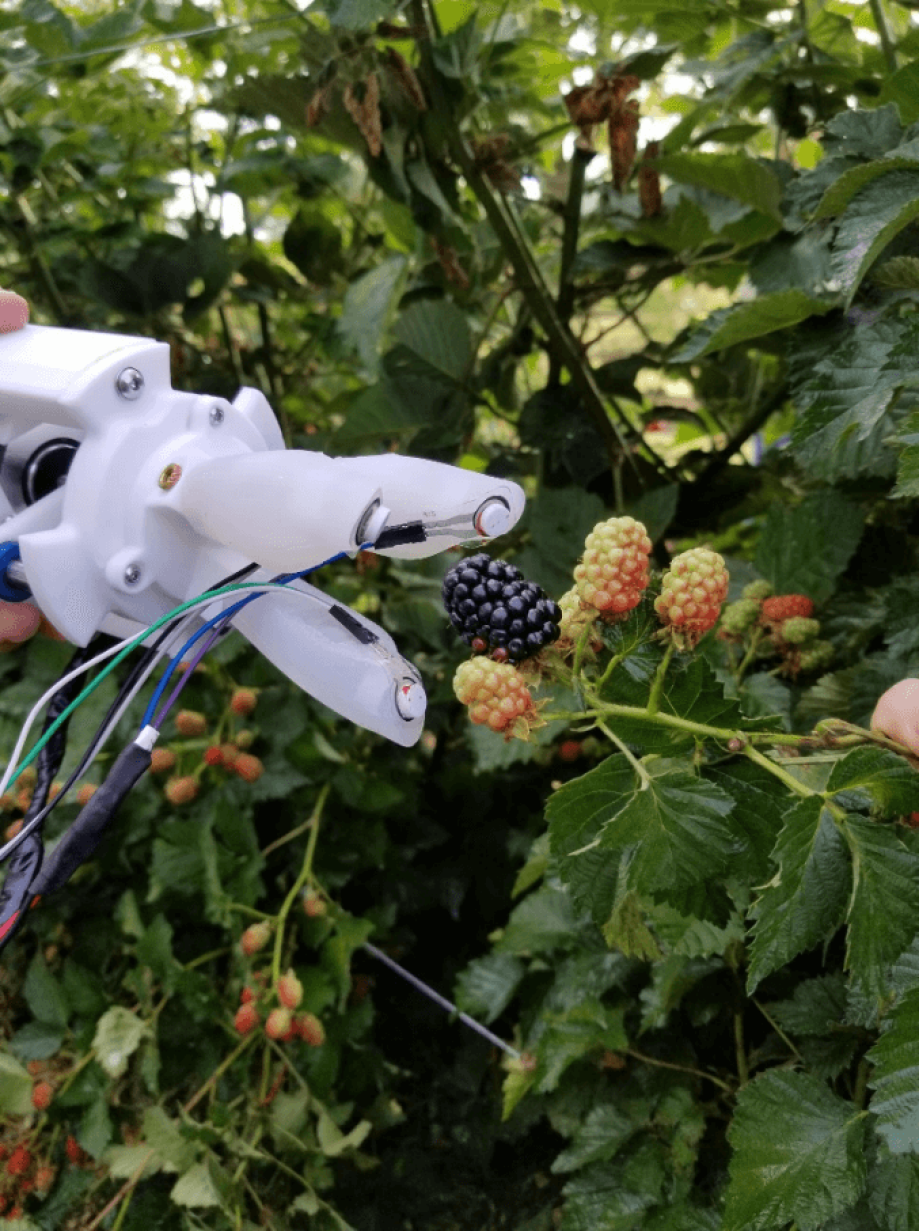
Utilizzando questi risultati, è stata sviluppata una nuova pinza robotica morbida guidata dai tendini utilizzando silicone morbido e conforme e un controllo attivo della forza di feedback sulla punta delle dita. La versatile pinza è stata usata per raccogliere 240 more: 60 bacche ciascuna a tre soglie di forza sulla punta delle dita (0,59 N, 0,69 N e 0,78 N) e 60 bacche come controllo con i sensori di forza rimossi. Le more sono state confezionate al momento della raccolta (20 bacche per confezione), e le loro caratteristiche qualitative sono state valutate dopo 21 giorni a 2°C. Le drupe rosse per le more raccolte con 0,59 N, 0,69 N, e 0,78 N erano rispettivamente 0%, 8%, e 16%, e il campione di controllo aveva 0%.
Sebbene sia fattibile sviluppare una pinza robotica morbida per la raccolta di more da mercato fresco, saranno necessarie ulteriori ricerche e sviluppi per l'implementazione commerciale. In questa ricerca, è stato possibile determinare il numero di pinze e la forza necessaria per raccogliere le more con una qualità di frutta accettabile alla raccolta e durante la conservazione. Successivamente, dobbiamo sviluppare la percezione robotica per trovare le more mature sulla pianta per la pinza per la raccolta e la conservazione.
Nell'immagine di copertina il prototipo di pinza robotica morbida guidata dai tendini con materiale flessibile e morbido e controllo attivo del ritorno di forza per la raccolta di more fresche.
Fonte: Southern Region Small Fruit Consortium